ArduinoプログラミングLESSON9は「押しボタンによる、サーボモーターの回転角度制御」です。
本LESSON記事は、プログラミングの学習とサーボモーターの知識を習得するプログラムになっています。
小学生、中学生も安心してプログラミングができるように、スクラッチでのプログラミング方法についても動画付きで紹介しています。
 せでぃあ
せでぃあ今回はサーボモーターについて学習してみよう!
本記事では、スクラッチとArduinoIDEプログラムどちらも紹介しています
LESSON1:LED点灯プログラミングの学習についてはこちら!
LESSON2:押しボタンスイッチを使うプログラミングの学習についてはこちら!
- サーボモーターとはどんな機器なのか
- Arduino IDEでのサーボモーター制御プログラミング方法
- スクラッチ(Scrattino3)を使ったプログラミング方法

せでぃあ
せでぃあはこんな人物です
✅プライム企業に勤める電気・機械設計エンジニア
✅親子の絆を深めるため、夏休みに子供と一緒に電子工作を製作
✅プログラミング電子工作「信GO機」が市の発明くふう展で優秀賞を受賞
✅現役お父さんエンジニアが教える小中学生と一緒に作る電子工作を出版
✅YouTubeチャンネル「せでぃあブログちゃんねる」運営中
サーボモーターについて
サーボモーターの説明

サーボモーターとは、指定した角度まで回転させることができるモーターです。
指定角度まで移動後は、その角度を維持しようとする動作をします。
今回使用するサーボモーター「SG-90」は、0~180度の範囲で回転動作角度を制御することができます。
サーボモーターの動作
サーボモーターは「パルス変調」PWM(Pulse Width Modulation)出力を用いることで、指定角度まで回転動作させることができます。
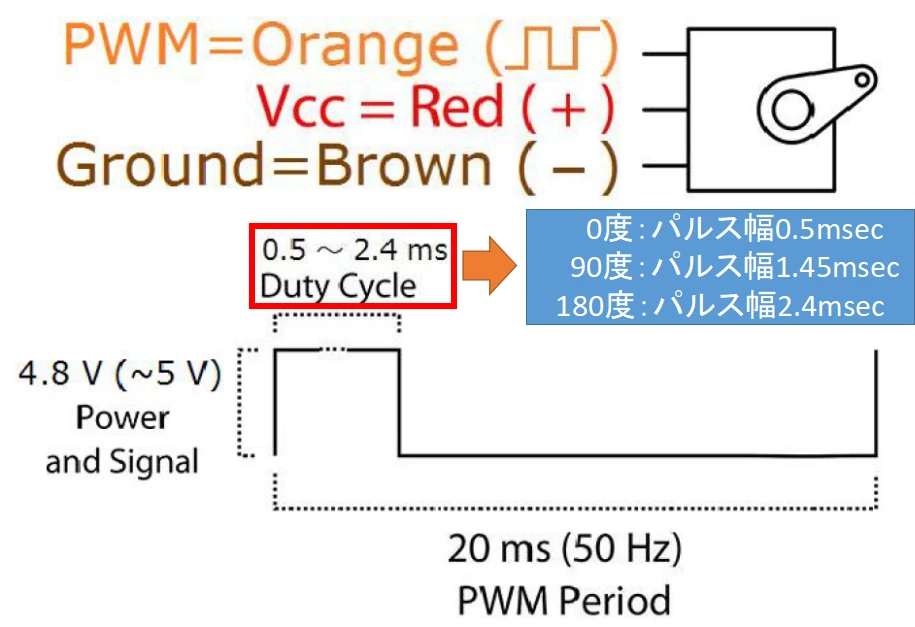
サーボモーターSG-90のデータシートを確認すると、以下の内容が書かれています。
- 1周期20msecのなかで、信号HIGH時間の長さで回転角度を指示する
- 0.5msec~2.4msecの間で回転角度指示を行う
- 90度を指示するときのパルス幅は(2.4-0.5)/2+0.5=1.45msec
せでぃあまずはイメージだけつかんでもらえたらOKです
押しボタンによる、サーボモーターの回転角度制御動作の説明
今回の説明する「サーボモーターの回転角度制御動作」は、以下になります。
- 押しボタンを押すとLEDが点灯する(ボタン入力確認用)
- 押しボタンを押すごとに、サーボモーターの回転角度が0度⇒90度⇒180度と変化する
- 180度回転角度でさらに押しボタンを押すと0度に戻り、以降繰り返し動作となる
- 押しボタンによる、サーボモーターの回転角度制御動作
- スクラッチを使ったプログラミング手順
まずは動画を見て、サーボモーターの回転角度制御動作とはどういったものなのか確認してください。
また、スクラッチを使ったプログラミングをするためには準備作業が必要です。
動画にて準備作業に必要な手順をくわしく説明しています。
サーボモーターの角度制御回路の作り方
プログラミングするために、パソコンが必要です。
電子部品等の必要な機器については、このあと説明します。
パソコンに統合開発ソフトウェア「ArduinoIDE」のインストールを行います。
Arduinoのセットアップ方法については、以下の記事にて詳しく説明しています。

Arduino IDEでの言語プログラミングも勉強したい方は、プログラミングの流れを理解しておいてください。
以下の記事にて、プログラミングから動作確認までの流れを詳しく説明しています。
パソコンにスクラッチでプログラミングするためのソフトウェア「Scrattino3(スクラッチーノ3)」のインストールを行います。
以下の記事にて詳しく説明しています。
電子部品とジャンパーワイヤの差し込みだけで配線が可能です。
専用開発ソフトウェア「Arduino IDE」を使います。
私が作成したプログラムをコピペして使ってください。
スクラッチプログラミングについては、動画または後述するプログラミング例を参考にしてください。
プログラムが完成したら動作確認を行います。
- 押しボタンを押すとLEDが点灯するか?
- 押しボタンを押すごとに、サーボモーターの回転角度が0度⇒90度⇒180度と変化するか?
- 180度回転角度でさらに押しボタンを押すと0度に戻り、以降繰り返し動作となるか?
記載のプログラムは動作確認済です。
動作確認方法については、以下の記事にて詳しく説明しています。
押しボタンによるモーター回転角度制御回路で使うもの
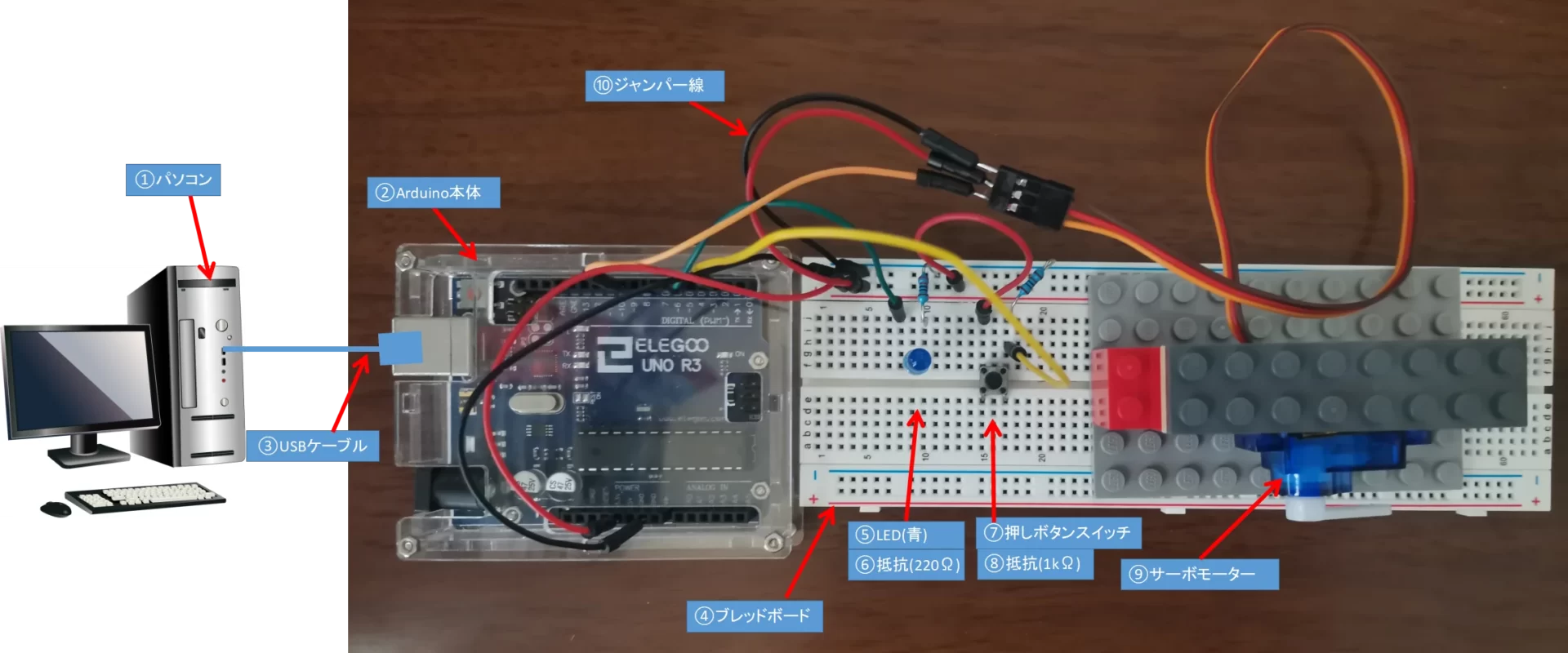
- パソコン
- Arduino本体
- USBケーブル
- ブレッドボード
- LED(青色)
- 抵抗(220Ω)
- 押しボタンスイッチ
- 抵抗(1kΩ)
- サーボモーター「SG-90」
- ジャンパー線(オスーオス)×8本
今回はELEGOO社のスーパースターターキットに含まれる部品で作ることができますが、Arduino裏面のショート対策としてクリアケースも併せて準備することをおすすめします。
モーター固定用のLEGOブロックはキットに含まれませんので、ご注意ください
モーターは動画撮影用に自前のLEGOブロックで固定しましたが、LEGOブロックを使わなくても配線・動作確認は可能です。


パソコン
プログラムを作成するために必要です。
プログラム制御の演算はArduino側で行うため、パソコンのSPECは一般的なモデルで十分対応可能です。
パソコンのOSはWindows、Macどちらでも対応可能です。
Arduino本体【キット】

基本的なエディション「Arduino Uno」の互換機である、ELEGOO社のUNO R3を使用しています。
Arduino本体裏面のショート対策に、別売りのクリアケースの購入をおすすめしています。
各ソケットの役割など、Arduino本体の機能について以下の記事にて詳しく説明しています。
USBケーブル【キット】

パソコンとArduinoを接続してプログラムデータのやり取りをするために必要です。
ブレッドボード【キット】
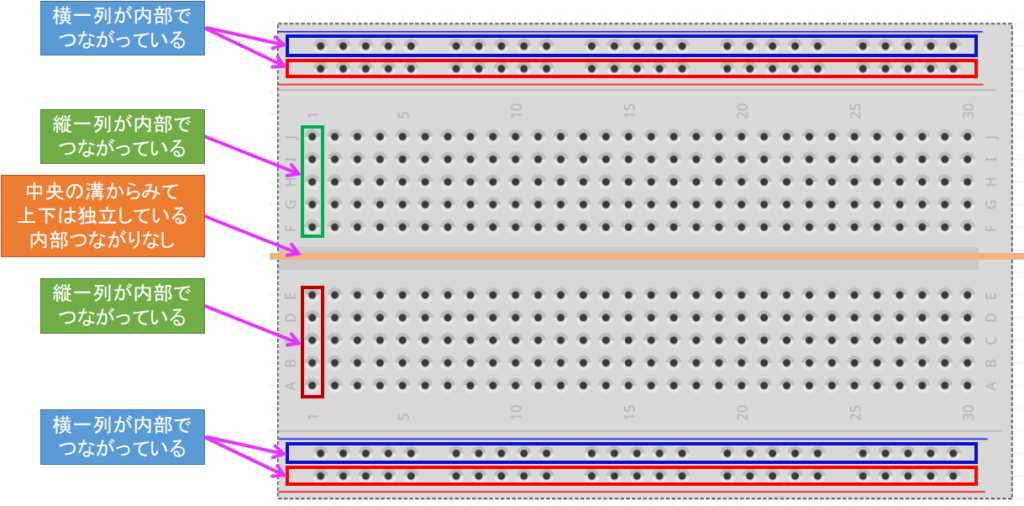
たくさんの穴が開いていて、部品の端子を穴に差し込むだけで電気的に接続が可能な板です。
説明図は30列のショート版ですが、スーパースターターキットに含まれる63列タイプでも機能面は同じです
LED(青)【キット】
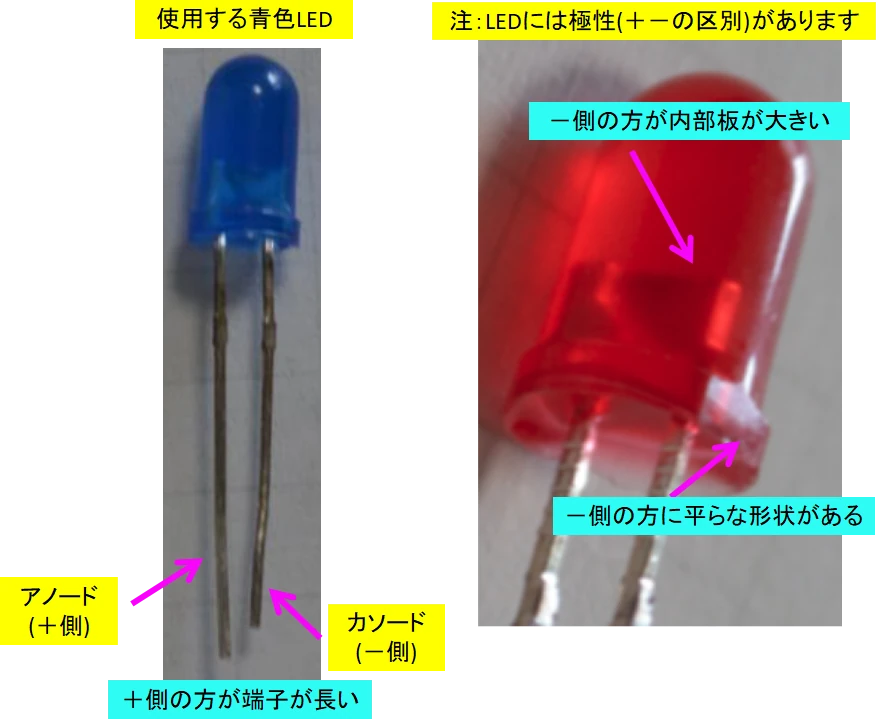
青のLED(発行ダイオード)を使用します。
LED素子にはプラスマイナスの極性があるため配線時には注意が必要です。
極性を間違えて配線すると、LEDは点灯しません
抵抗(220Ω)【キット】
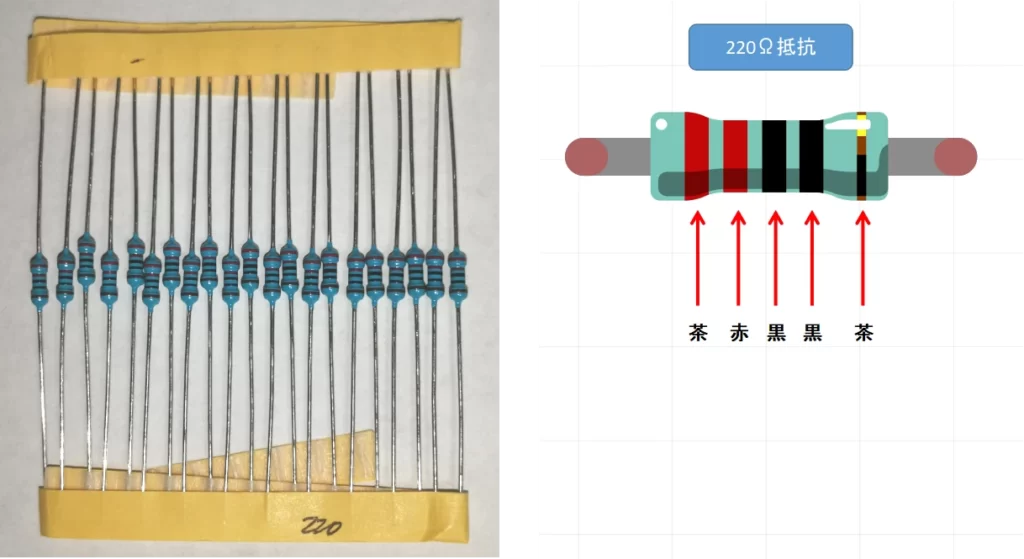
220Ωの抵抗を使用し、LEDに接続します。
LEDは流せる電流値に制約があるため、抵抗を直列つなぎすることでLEDに流れる電流を調節します。
抵抗は極性がないので、配線時に方向を気にする必要はありません。
LEDを点灯させるために接続する抵抗の選び方については、こちらの記事で詳しく説明しています。
押しボタン【キット】

今回のLESSONでは、押しボタンスイッチを使用します。
押しボタンは押されている間のみ、上記写真での2点が内部でつながります。
このようなボタンをモーメンタリボタンといいます。
今回は扱いませんが、ボタンから手を離してもONしたままになるボタンをオルタネイトボタンといいます。
モーメンタリ・オルタネイトボタンについては以下記事にて詳しく説明しています。
抵抗(1kΩ)【キット】
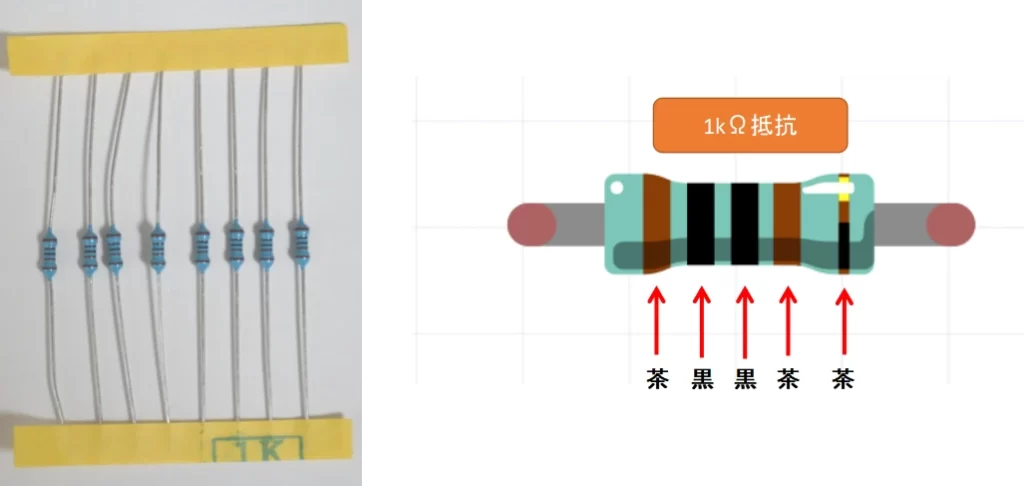
1kΩの抵抗を1本使用し、押しボタンスイッチに接続します。
抵抗を接続するのは、押しボタンがOFFのときにArduino本体がノイズによる誤検出することを避けるためです。
この記事では詳しく説明しませんが、ボタンを押していないのに押されたと誤認識されることを避ける目的であるということだけ覚えておいてください。
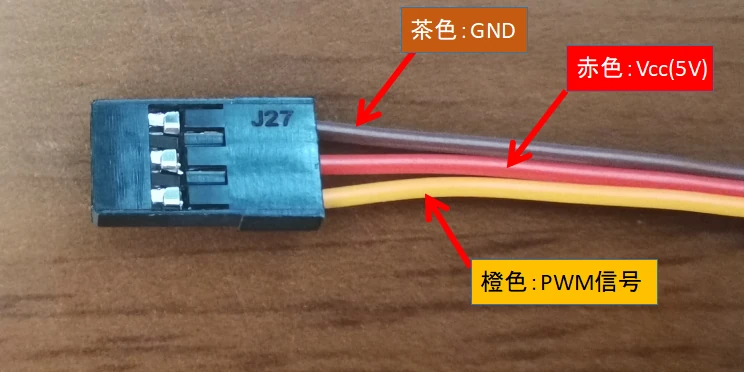
サーボモーター「SG-90」【キット】
サーボモーター「SG-90」を使用します。
サーボモーターは指定した回転角度を指示して、回転させることができる機器です。
ジャンパー線(オスーオス)【キット】
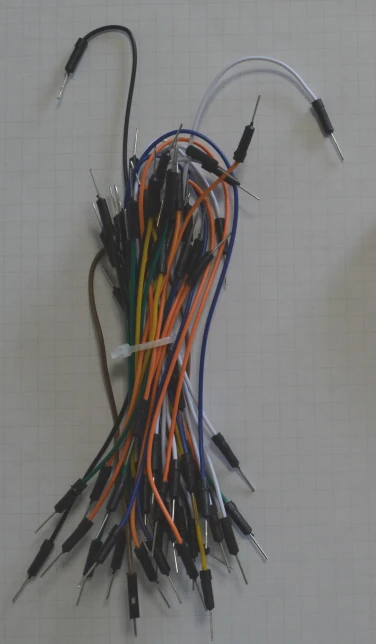
ジャンパー線を8本使用します。
Arduino本体とブレッドボードの接続や、ブレッドボードの共通電源ライン(GNDまたは5V)からブレッドボード内の配線系統穴に差し込んで接続するのに使います。
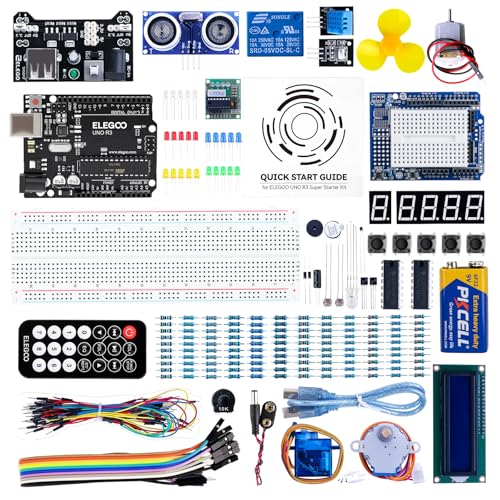
スターターキットに含まれる機器に関しては、以下の記事にて詳しく紹介しています。
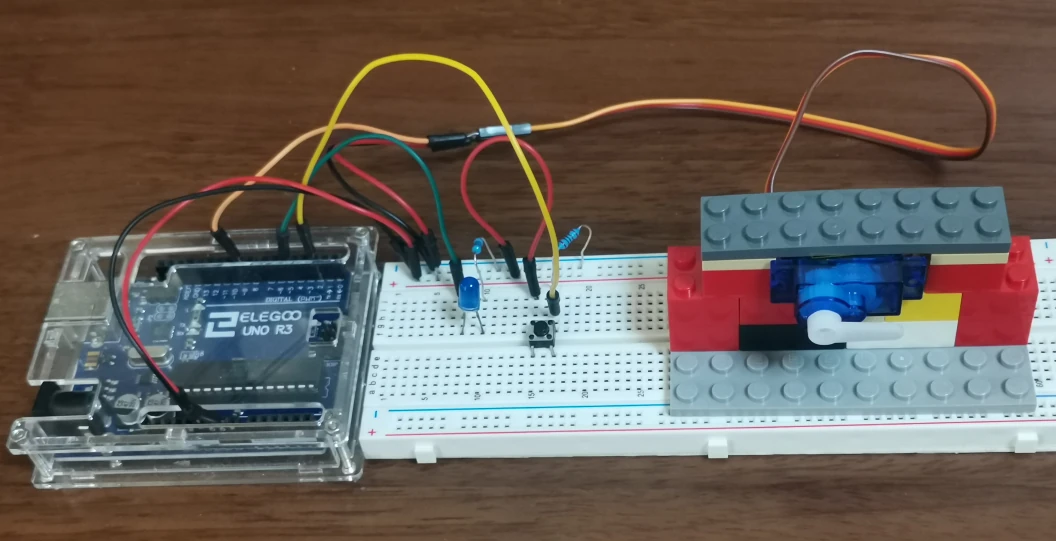
配線のやり方
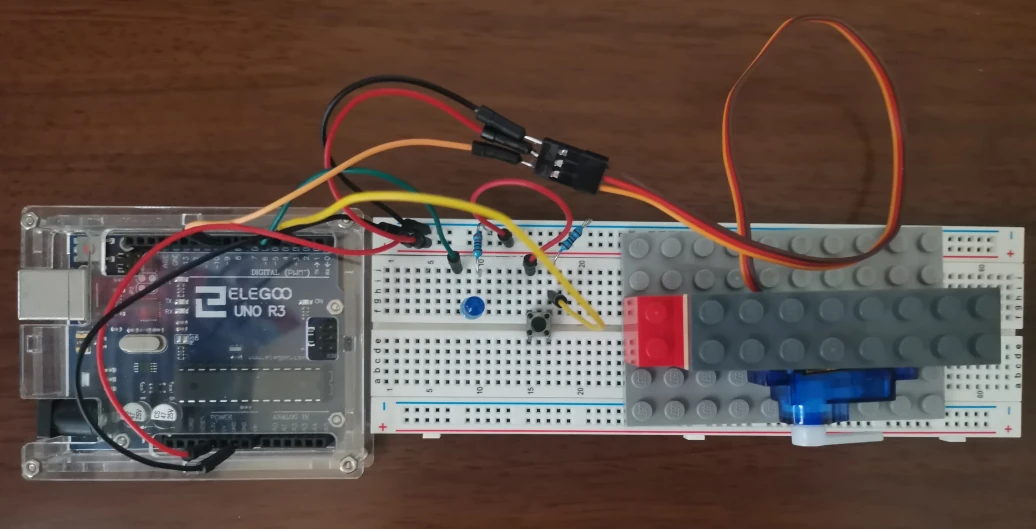
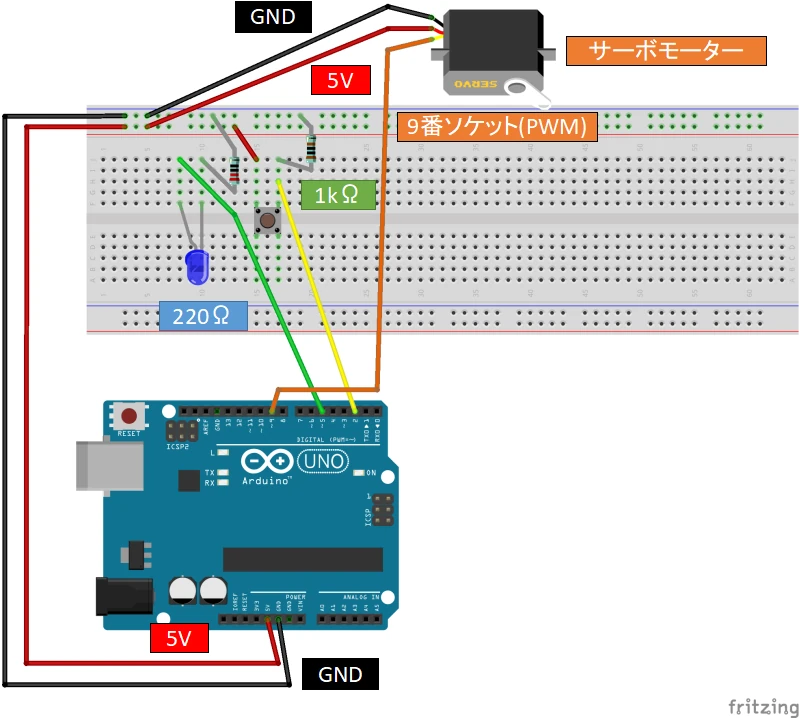
上図が配線説明図となりますので、これと同じ配線をすれば完成します。
サーボモーターからはコネクタ付きリード線が伸びてきていますので、写真のごとくジャンパー線を使って配線します。
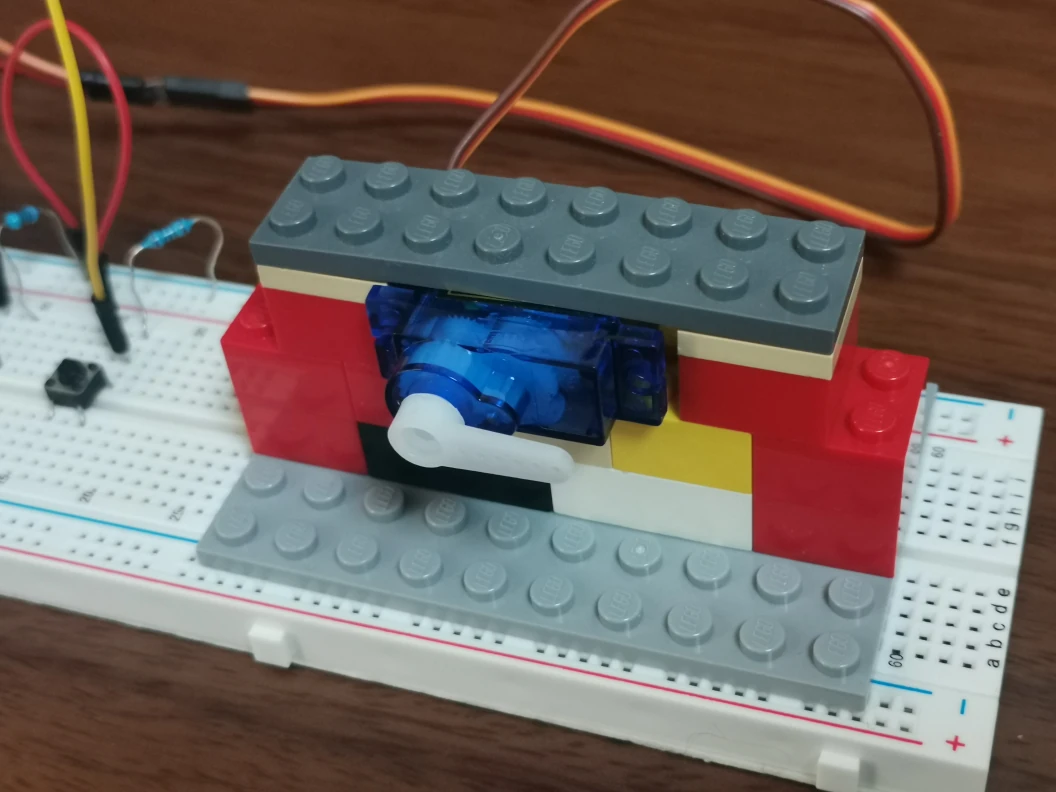
今回サーボモーターは有り合わせのLEGOブロックで固定しましたが、必須内容ではありません。
- LEDをブレッドボードに差し込む
- 押しボタンをブレッドボードに差し込む
- 220Ω抵抗をブレッドボードに差し込む(LED用)
- 1kΩ抵抗をブレッドボードに差し込む(押しボタン用)
- ジャンパー線をブレッドボードとArduinoソケットに差し込む
- ジャンパー線をブレッドボード内で配線する(押しボタンスイッチと+5V)
- ジャンパー線を使って、サーボモーターからのリードコネクタに差し込む
LEDや抵抗、ジャンパー線はArduinoのソケットやブレッドボード穴に差し込むだけでOKです。
LEDはプラス・マイナスの極性があります。
押しボタンは端子が飛び出ている側がブレッドボード長手側になるように差し込みます。
抵抗は極性がありません。
LED極性の見分け方については、こちらをご確認ください。
機器故障させないためにも、USBケーブルを抜いた「通電OFF」状態にて配線を行ってください
プログラミングのやり方
Arduino IDEとスクラッチの両方について、プログラミング方法とプログラムを説明します。
2つのプログラミングの特徴は以下の通り。
ArduinoIDE:文字列による命令語形式
スクラッチ:ブロックによるビジュアル形式
文字列を使わないスクラッチの方が、直感的で分かりやすく小学生におすすめのプログラミング方法になります。
スクラッチを使ってプログラミングをする方は、スクラッチの説明まで読み飛ばしてください。
Arduino IDE
Arduino IDEとは統合開発ソフトウェアで、C言語のような文字列を用いたプログラミング方法です。
プログラミングするにあたり、ある程度の命令語を知っておく必要があります。
Arduino IDEのインストール方法については、以下の記事で詳しく説明しています。
プログラミング方法
Arduino IDEを使って、文字列プログラミングを行います。
Arduino IDEを使ったプログラミング~動作確認方法については、以下の記事で詳細説明しています。
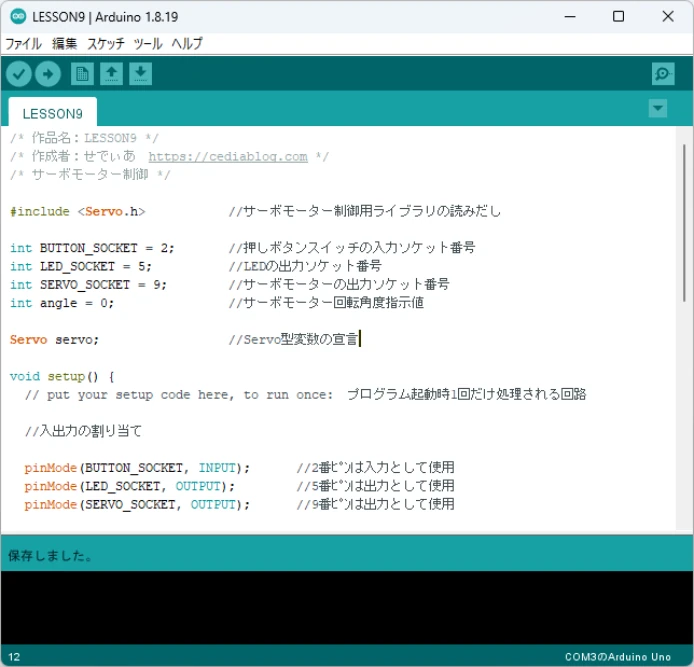
Arduino IDEプログラム
/* 作品名:LESSON9 */
/* 作成者:せでぃあ https://cediablog.com */
/* サーボモーター制御 */
#include <Servo.h> //サーボモーター制御用ライブラリの読みだし
int BUTTON_SOCKET = 2; //押しボタンスイッチの入力ソケット番号
int LED_SOCKET = 5; //LEDの出力ソケット番号
int SERVO_SOCKET = 9; //サーボモーターの出力ソケット番号
int angle = 0; //サーボモーター回転角度指示値
Servo servo; //Servo型変数の宣言
void setup() {
// put your setup code here, to run once: プログラム起動時1回だけ処理される回路
//入出力の割り当て
pinMode(BUTTON_SOCKET, INPUT); //2番ピンは入力として使用
pinMode(LED_SOCKET, OUTPUT); //5番ピンは出力として使用
pinMode(SERVO_SOCKET, OUTPUT); //9番ピンは出力として使用
//Servoライブラリ
servo.attach(SERVO_SOCKET); //サーボモーターを接続するソケット番号を指定
servo.write(0); //サーボモーター回転角度の初期化
//シリアル通信設定
Serial.begin(9600);
}
void loop() {
// put your main code here, to run repeatedly: プログラム起動後ループ処理される回路
Serial.println(angle); //回転角度指示値をシリアル出力
if(digitalRead(BUTTON_SOCKET) == HIGH){ //押しボタンスイッチがONのとき
digitalWrite(LED_SOCKET,HIGH); //LEDを点灯させる
if(angle < 180){ //回転角度指示値が180度未満のとき
angle = angle + 90; //回転角度指示値に45度加える
}else{
angle = 0 ; //回転角度指示値を0度にする
}
servo.write(angle); //指定角度まで回転させる
while(digitalRead(BUTTON_SOCKET) == HIGH){ //押しボタンスイッチが押されたままのときに待機させる
}
digitalWrite(LED_SOCKET,LOW); //LEDを消灯させる
}
delay(100); //0.1秒ウェイト
}
上記が押しボタンによるサーボモーターの回転角度制御回路のプログラムになります。
Arduino IDEのプログラム画面にコピーアンドペーストすることで、動作確認まで進めることができます。
各プログラム列の右側にプログラム内容をコメント記入してありますので参考にしてください。
 せでぃあ
せでぃあ慣れてきたら制御する角度を細かく刻んでみてもいいね!
命令語の解説
今回のプログラムで使用した命令文について、解説します。
変数のデータ型指定
変数のデータ型を指定するものです。
今回はピンソケット番号を代入するので整数を扱う「int型」を指定します。
またアナログ出力値は「0~255」の整数を扱いますので、同じく「int型」を指定します。
| データ型 | 説明 | 扱える範囲 |
|---|---|---|
| int | 2バイトの整数を代入可能。 | -32768~32767 |
| long | 4バイトの整数を代入可能 | -2,147,483,648~2,147,483,647 |
| float | 4バイトの小数を代入可能。 | 3.4028235×1038~-3.4028235×1038 |
| char | 1バイトの値を代入可能。文字列の代入に利用されます。 | -128~127 |
| boolean | 0または1のみ代入可能。フラグのON-OFFなどに利用されます。 | 0,1 |
Serial.begin(通信速度)
シリアル通信を初期化します。
通信速度は単位が「ビット/秒」で、300、1200、2400、4800、9600、14400、19200、28800、38400、57600、115200から選択します。
Serial.println(書き込むデータ,データを変換する方法)
文字列をシリアル送信して改行します。
データを変換する方法は省略が可能です。
DEC:10進数、HEX:16進数、OCT:8進数、BIN:2進数
pinMode(入出力番号,INPUTまたはOUTPUT)
指定したデジタル入出力ソケット番号の機能を指示します。
入力として使用する場合は「INPUT」、出力の場合は「OUTPUT」を指定します。
digitalRead(入出力番号)
指定したデジタル入出力ソケット番号の状態がON、またはOFFであるか確認します。
ONのときは「HIGH」、OFFのときは「LOW」の値が返ってきます。
digitalWrite(入出力ソケット番号,HIGHまたはLOW)
指定したデジタル入出力ソケット番号の電圧をON、またはOFFします。
ONさせたいときは「HIGH」、OFFさせたいときは「LOW」を指定します。
delay(時間)
()内で指定した時間(単位はmsec)だけ、プログラム実行を待たせます。
if 文
条件が成立しているときのみ、{ }内の文が実行されます。
条件が成立しなければ、{ }内の文は処理されず、次の処理に移ります。
if( 条件 ){
条件成立時に実行する文 ;
}
if else文
条件式が成立しているか否かで、どちらの命令文を実行するか振り分けます。
if( 条件 ){
条件成立時に実行する文 ;
} else {
条件不成立時に実行する文 ;
}
while 文
( )内の条件が成立している間は、{ }内の文を繰り返し実行します。
while( 条件 ){
繰り返し実行する文 ;
}
比較演算子
| 比較演算子 | 説明 |
|---|---|
| A == B | AとBが等しい場合に成立 |
| A != B | AとBが等しくない場合に成立 |
| A < B | AがBより小さい場合に成立 |
| A <= B | AがB以下の場合に成立 |
| A > B | AがBより大きい場合に成立 |
| A >= B | AがB以上の場合に成立 |
Servoライブラリの説明
今回ArduinoIDEプログラムでは、標準で用意されているサーボモーター制御用ライブラリ「Servo」を利用すると便利です。
制御したい角度値を指定するだけで、簡単に回転角度制御することができます。
Servoライブラリの読み出し
プログラム冒頭の宣言部にてServoライブラリを読み出します。
#include <Servo.h>
servo型変数の指定
プログラム冒頭の宣言部にてServo型の変数を定義します。
Servo servo;
変数「servo」は例であり、任意の変数文字列を指定してください
attach(入出力ソケット番号,0度のときのパルス幅,180度のときのパルス幅)
宣言したServo型の変数に入出力ソケットピン番号を割りあてます。
パルス幅指定は任意で、指定しない場合はデフォルト値が適用されます。
<デフォルト値>
・0度:544msec
・180度:2400msec
servo型変数.attach(サーボモーターに接続するソケット番号、0度のパルス幅、180度のパルス幅)
今回のLESSONプログラムのパルス幅は、デフォルト値を適用しています。
write(回転角度)
動作させたいサーボモーターの回転角度を指示します。
servo型変数.write(回転させたい角度(0~180))
筆者おすすめのArduinoの参考書を紹介しています。
スクラッチ
Scrattino3(スクラッチーノ3)というソフトウェアを使って、プログラミングする方法です。
Scrattino3のインストール方法やプログラミング、動作確認方法については、以下の記事にて詳しく説明しています。
 せでぃあ
せでぃあ動画を参考にプログラミングしてみよう
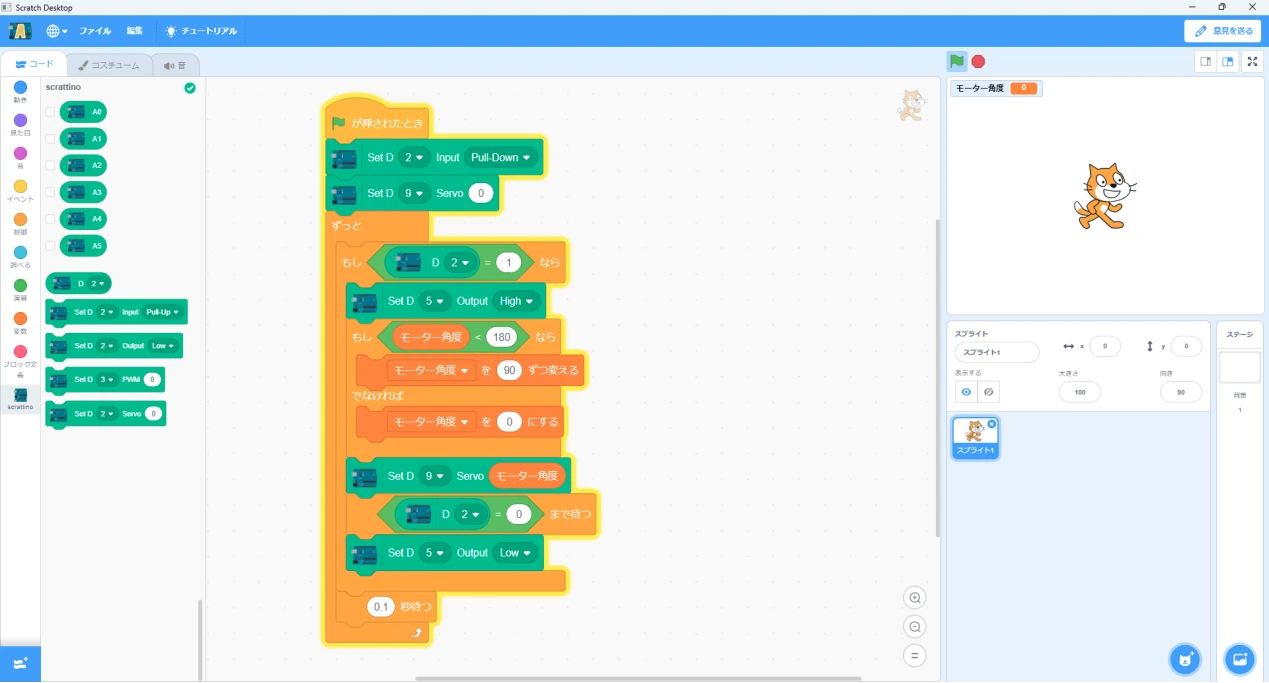
スクラッチプログラム(Scrattino3|スクラッチーノ3)
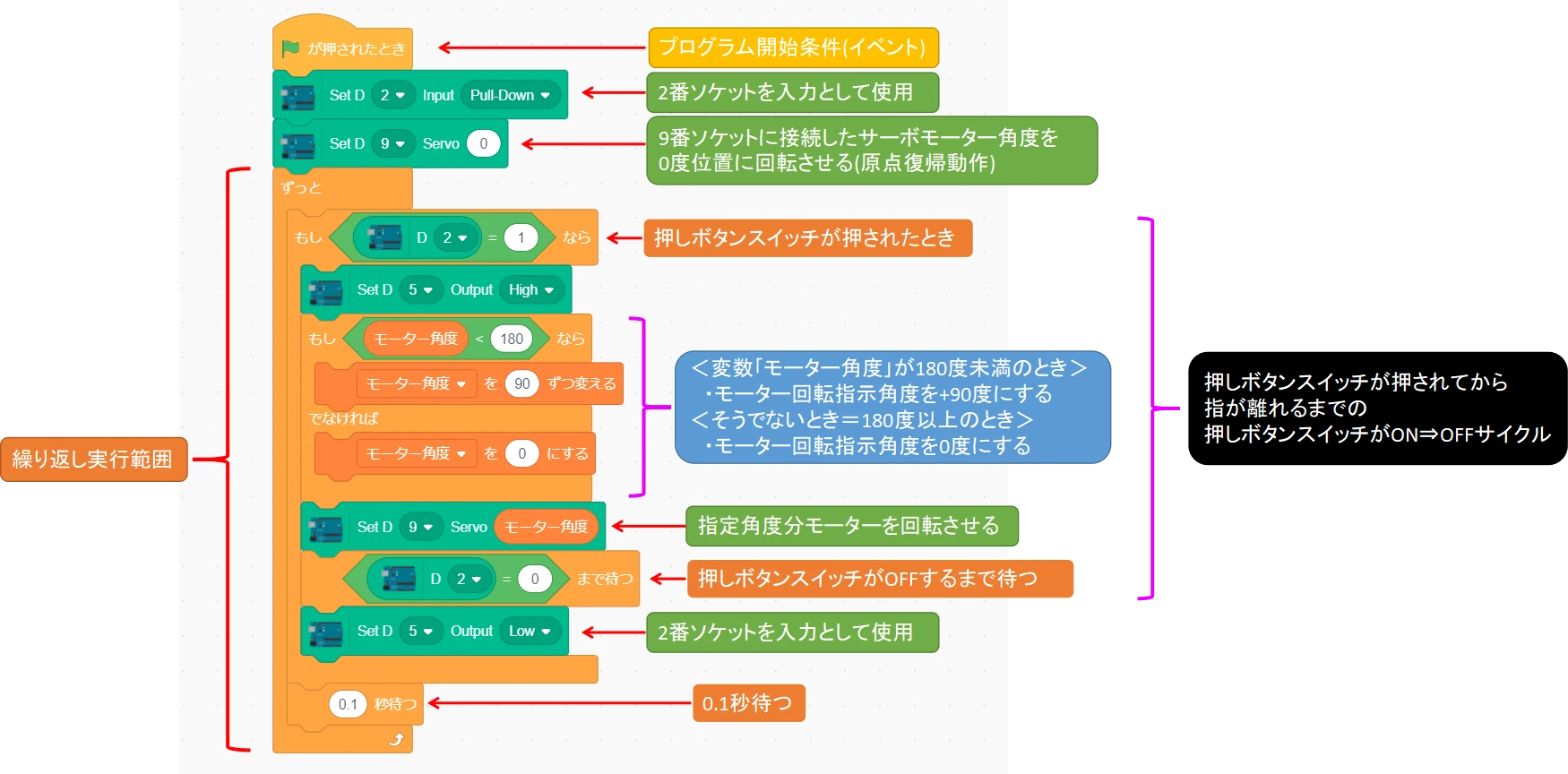
上記がスクラッチのプログラミングとなります。
右側の解説の()内はブロックの種類になります。
Scrattino3(スクラッチーノ3)でのスクラッチプログラミングの作り方について、本記事冒頭の動画にて詳しく説明しています。
Arduino専用ブロックについては、以下の記事にて詳しく説明しています。

Scrattino3での変数指定方法
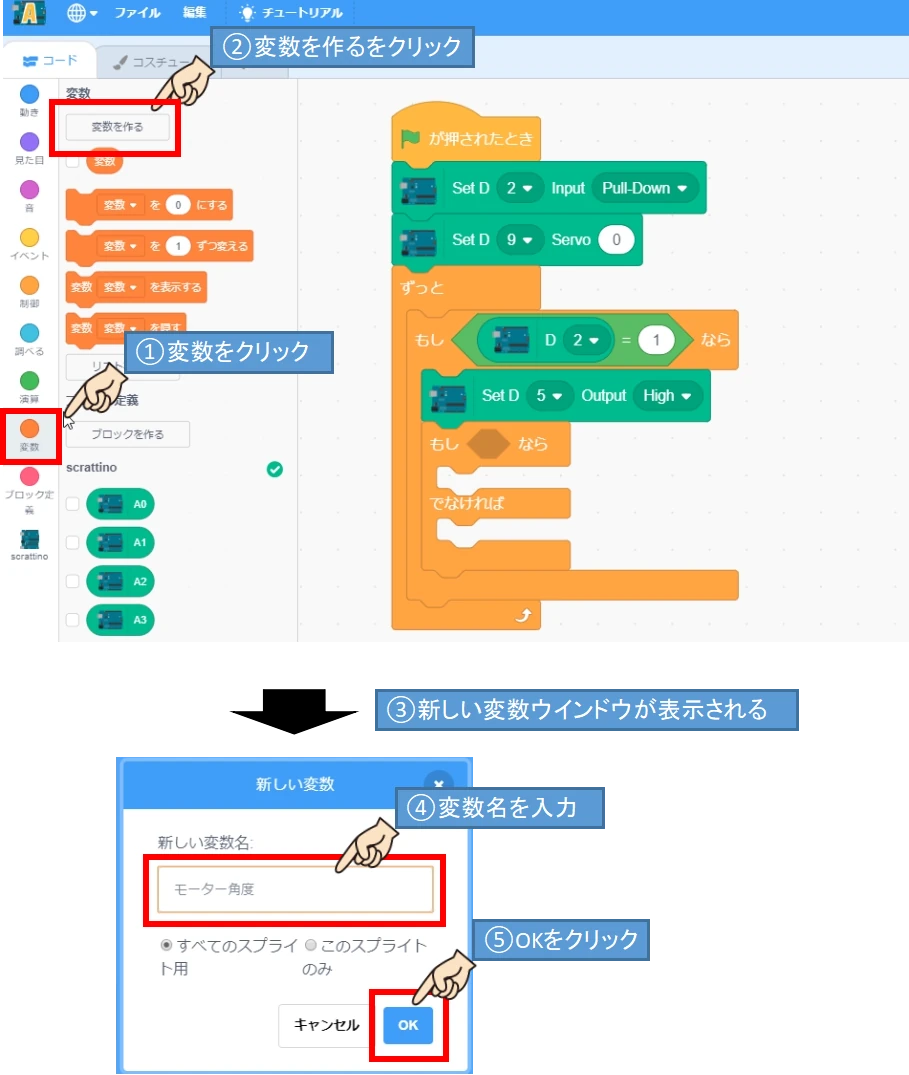
今回はモーター回転指示角度が「変数」となります。
上記説明手順に沿って、変数「モーター角度」を作成してください。
動作確認方法
- 押しボタンを押すとLEDが点灯するか?
- 押しボタンを押すごとに、サーボモーターの回転角度が0度⇒90度⇒180度と変化するか?
- 180度回転角度でさらに押しボタンを押すと0度に戻り、以降繰り返し動作となるか?
上記項目について確認していきましょう。
モータ回転角度指示値の確認方法
Arduino IDE、スクラッチ「Scrattino3(スクラッチーノ3)」それぞれ、変数の現在値を確認する方法があります。
Arduino IDEでのアナログ出力値確認方法
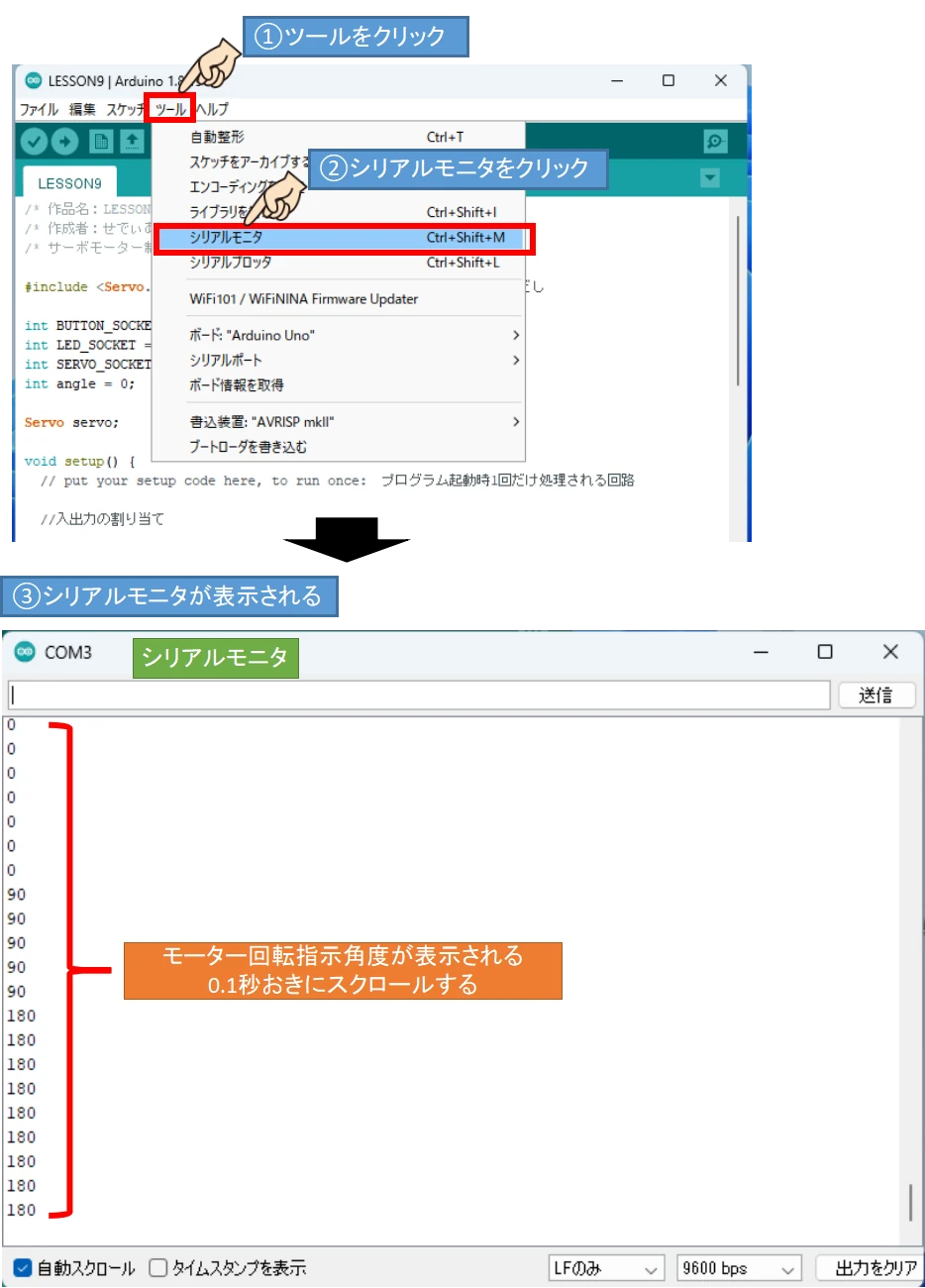
今回のプログラムは繰り返し演算プログラムに0.1秒delay命令を仕込んでいるので、0.1秒おきの値取得となります
Scrattino3でのアナログ出力値確認方法
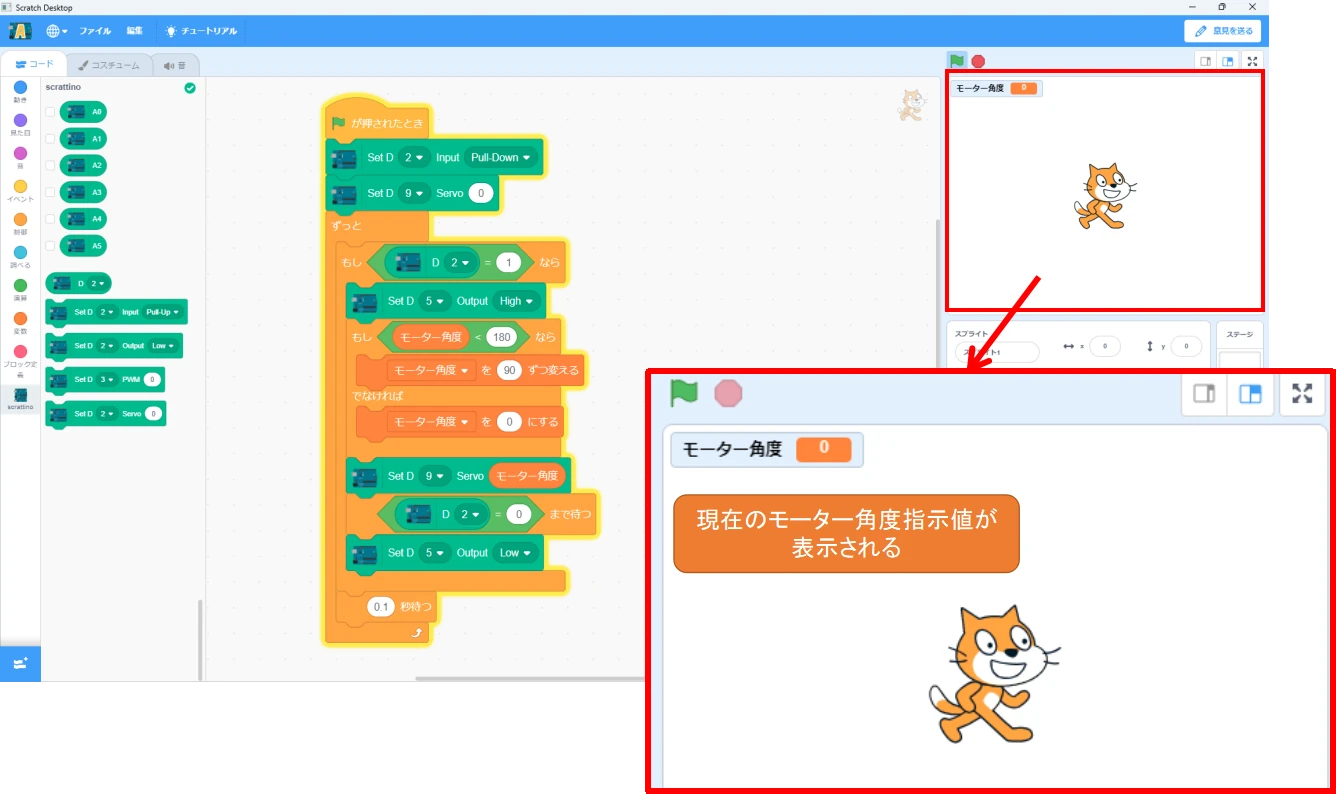
画面右上のネコのキャラクターがいるウインドウに変数値が表示されます。
押しボタンを押すとLEDが点灯するか?
押しボタンスイッチを押している間は、LEDが点灯するか確認してください。
あえてLED点灯回路を構築した理由
押しボタンスイッチが押されたかどうかを視覚的に確認するために、あえてLEDによる点灯回路を構築しました。
これにより、押しボタンスイッチが押されたことをArduino側が受け付けているかどうかの結果ができます。
正しく動作しなかったときに押しボタンスイッチ側の配線を確認すべきかどうかの判断ができるため、問題解決にたどり着きやすくなります。
押しボタンを押すごとに、サーボモーターの回転角度が0度⇒90度⇒180度と変化するか?
まずプログラム実行開始直後は0度位置に回転します。
押しボタンスイッチを押すごとに、サーボモーターが0度⇒90度⇒180度と回転することを確認してください。
170度程度までしか回転しませんがモーター個体差の影響であり、動作不良ではありません
せでぃあ大きく3つの角度位置に移動していることを確認してください
180度回転角度でさらに押しボタンを押すと0度に戻り、以降繰り返し動作となるか?
ボタンスイッチを押すたびに0度⇒90度⇒180度⇒0度・・・と繰り返し動作となることを確認してください。
LESSON9:サーボモーター角度制御回路のまとめ
- サーボモーターは指定した回転角度に回転制御できる機器
- 0~180度の範囲で角度の指定が可能
- ArduinoIDE、スクラッチともサーボモーター専用の角度命令方法を使用可能
小学生のお子様には断然、スクラッチでのプログラミングがおすすめです!
サーボモーターの回転角度制御動作を学習したら、次のLESSON10(可変抵抗器)にチャレンジしてください。
せでぃあ次は可変抵抗器を使ったアナログ制御にチャレンジしよう
子供の成長を育む!小学生のお子様にぴったりなロボット教室を厳選しました!

サーボモーターの回転速度変更にチャレンジしてみよう!
Arduinoプログラミング(スクラッチも)を使った電子工作を紹介しています。


コメント